




Aparador de vídeo
Direcció per sistema de filferro: control de precisió dels vehicles moderns
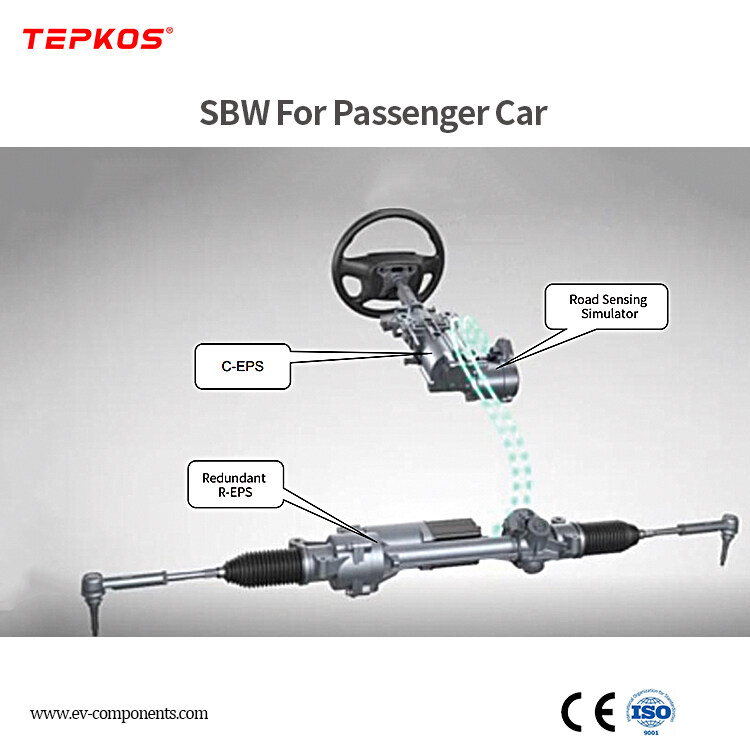
Disseny bàsic: control bidireccional per a la interacció natural
Dual - Arquitectura del mòdul
Mòdul de retroalimentació de la força del volant:
- Combina els sensors d’angle (resolució de 0,2 graus), els sensors de parell (0,5n · m de precisió) i una carretera - Motor de sensació per capturar l’entrada del conductor i simular la retroalimentació del món real - (per exemple, adherència de pneumàtics, textura de la carretera).
- El mecanisme de reductor garanteix una transmissió de força suau, amb una relació d’engranatges 5: 1 per a una resposta precisa amb ajustaments de direcció petits.
Mòdul d’execució de direcció:
- Rep senyals d'angle mitjançant autobusos i condueix els actuadors de les rodes amb una precisió posicional de 0,1 graus, garantint l'alineació instantània amb la intenció del conductor.
- Integra els sensors actuals per controlar la càrrega del motor, crític per calcular la resistència a la carretera i l’ajust dels nivells d’assistència.
Posició - bucle de retroalimentació controlada
Real - Sincronització de temps: compara l'angle del volant (entrada del controlador) amb l'angle de la roda frontal - (moviment real), corregint les discrepàncies a 50ms per mantenir el 99,5% de precisió de seguiment.
Speed - Assistència adaptativa: redueix el parell d’assistència a velocitats elevades (més gran o igual a 80 km/h) per a la conservació del carril estable i augmenta a velocitats baixes (menys o iguals a 30 km/h) per a un aparcament sense esforç - adaptant -se a 80+ escenaris de conducció.

Funcions de disseny del sistema L4 SBW
|
Pla |
Funcions |
Requisits de seguretat funcionals |
Normes del sistema de qualitat |
Arquitectura elèctrica del vehicle |
Arquitectura de programari |
|
L4 |
Filferro - Direcció controlada + simulació de la carretera |
Asil - d |
16949+ Aspice -4+ ISO26262 |
Controlador de domini centralitzat |
Autosar |
|
Requisits de l'arquitectura del maquinari de control de direcció |
|||||
|
Motor |
Xip de control principal |
Redundància del sensor |
Unitat de potència |
alimentació |
comunicació |
|
6-fase sense escombrat |
(Funció + bloqueig - nucli de pas)*2 |
Angle de volant*2, angle del motor*2 |
Redundància del circuit d’accionament |
Alimentació doble |
Can - fd+can |
|
Requisits de l'arquitectura de simulació del sentit de la carretera |
|||||
|
6-fase sense escombrat |
(Funció + bloqueig - nucli de pas)*2 |
Parell*4, angle de volant*2, angle del motor*2 |
Circuit de doble unitat |
Alimentació doble |
Can - fd+can |
Avantatges tècnics: el rendiment compleix la fiabilitat
Experiència de conducció millorada
Feet de carretera personalitzable: els vehicles de luxe poden oferir modes de retroalimentació 3+ (confort, esport, eco) mitjançant sintonització de programari, ajustant els nivells de resistència a les preferències del conductor.
Vibració reduïda: algoritmes d’amortiment avançats a la carretera - Setuen les vibracions del volant tallat al motor en un 40% en comparació amb els sistemes mecànics, millorant la comoditat a les carreteres rugoses.
Espai i eficiència energètica
30% més espai de cabina: elimina les columnes i enllaços de direcció tradicionals, alliberament de la sala de bateries EV o dissenys interiors ergonòmics.
El 50% del consum d’energia menor: els motors sense escombretes del mòdul d’execució aconsegueixen un 92% d’eficiència energètica, allargant el rang EV fins a un 7% en comparació amb els sistemes hidràulics.
Seguretat - Disseny llest
Dual redundancy: compta amb sensors de còpia de seguretat i rutes de potència (ASIL - B compatible), assegurant el 99,9% de tolerància a les falles - crítica per a la preparació de conducció autònoma.
Protecció IP67: pols - ajustat i aigua - resistent (submersió 1m), fiable en totes les condicions meteorològiques (per exemple, pluja pesada, pols de rotació - rutes de carretera).

Aplicacions: adaptat per a vehicles diversos
Cotxes de passatgers i models de rendiment High -
Els viatgers urbans: assistència de llum (2–4n · m torque) redueix la fatiga del conductor durant la parada - el trànsit d’inici, amb 2,5 - bloqueig de gir - a bloquejar per obtenir una maniobrabilitat estreta.
Cotxes esportius: feedback ferm (6–8n · m torque) en mode esportiu millora la precisió de la volta, traduint els canvis de la superfície de la carretera en respostes de direcció intuïtives.
Vehicles comercials lleugers
Vans de lliurament: High - Execució de parell (1500N · M pic) Hands Counded gira sense esforç, mentre que la velocitat - Assistència sensible millora l'estabilitat a la velocitat de la carretera.
Els autobusos elèctrics: el disseny modular s’ajusta a diversos dissenys de xassís, amb integració de bus CAN per a una comunicació perfecta amb sistemes de control de vehicles.

Assegurança de qualitat: dissenyat per a la longevitat
Protocols de prova rigorosos
10.000 - Prova de resistència de l’hora: simula 150.000 km de conducció per validar la durabilitat del motor i del sensor (taxa sense fallades del 98%).
Proves tèrmiques i de vibració: funciona de manera fiable de -40 graus a +85 i resisteix les vibracions 50G, ideals per a climes globals.

Redefinir la direcció amb precisió electrònica
La nostra direcció per Wire System permet als vehicles amb control adaptatiu, sensació de carretera natural i espai - disseny eficient - ideal per a les necessitats de mobilitat modernes. Amb el suport de proves rigoroses i OEM - flexibilitat amistosa, és l’elecció fiable per millorar la seguretat, la comoditat i el rendiment en els cotxes de passatgers i els vehicles comercials.
Poseu -vos en contacte amb nosaltres avui per explorar com la nostra solució SBW pot elevar l'experiència de direcció del vostre vehicle - dissenyada per a precisió, construïda per al futur de la conducció.






